Ship Telemetry & Radar System
A professional-grade ship telemetry and radar visualization system built with Qt/C++. Features real-time position tracking, reliable UDP+ACK communication protocol, and authentic maritime radar display with wave-based scanning animation.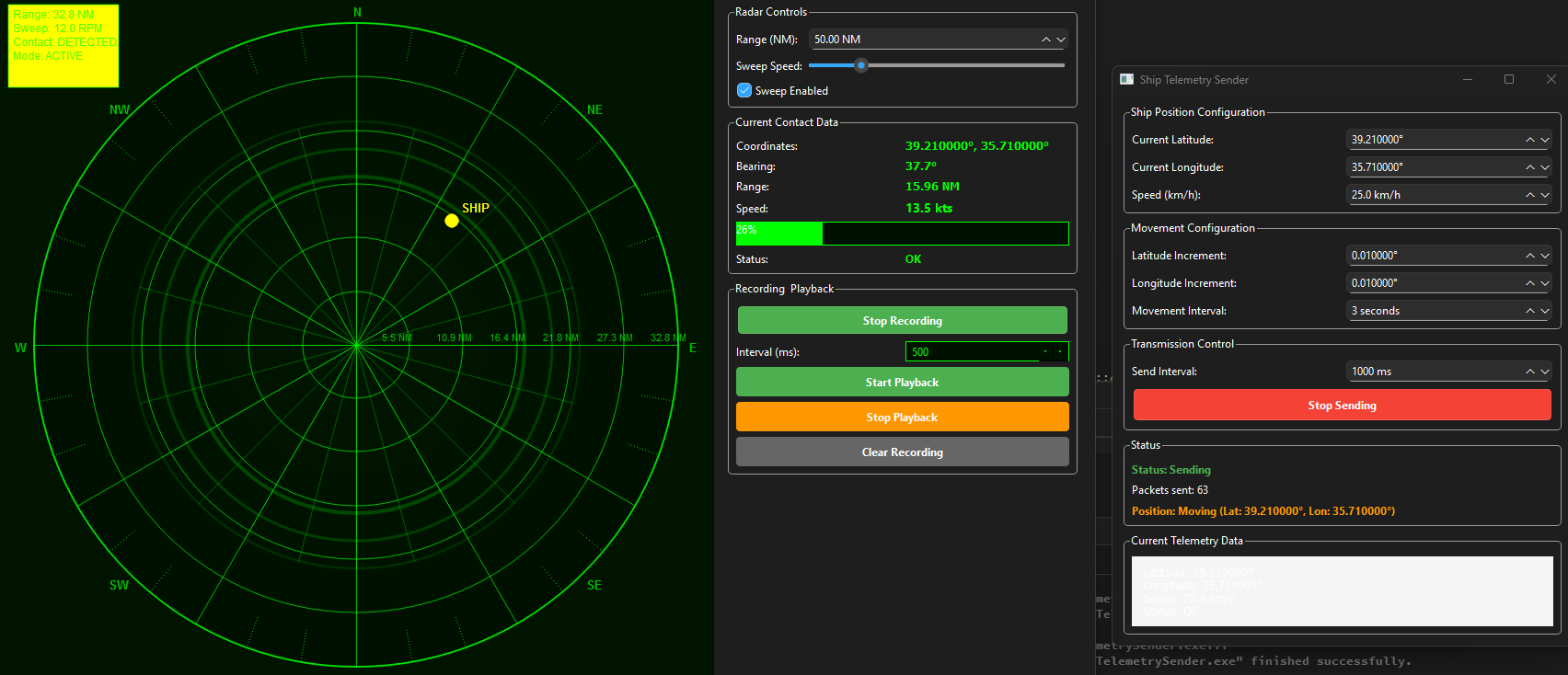
🚢 Features
Real-time Ship Tracking
- Live position updates with configurable movement patterns
- Smooth interpolation for missing data packets
- Bearing and range calculation from radar center
- Speed conversion between km/h and nautical knots
Advanced Radar Display
- Circular maritime radar with authentic green-on-black styling
- Wave-based scanning animation emanating from center
- Range rings with nautical mile markings
- Compass rose with cardinal directions (N, NE, E, SE, S, SW, W, NW)
- Single contact tracking showing current ship position
- Configurable range (50-1000 NM) with mouse wheel zoom
Reliable UDP+ACK Protocol
- Hybrid UDP protocol with acknowledgment mechanism
- Sequence numbering for packet ordering
- Automatic retransmission (up to 3 attempts)
- Thread-safe buffering with non-blocking I/O
- Packet loss detection and interpolation
- Real-time network statistics with loss rate monitoring
🎛️ System Components
TelemetrySender (Ship Simulator)
Simulates a ship transmitting its position and telemetry data.
Configuration Options:
- Starting Position: Latitude/Longitude with 6-decimal precision
- Movement Pattern: Configurable lat/lon increments per movement
- Speed Control: 0-100 km/h ship speed
- Timing Control:
- Send interval: 100ms - 10s
- Movement interval: 1-60 seconds
- Reliability Settings: ACK timeout, max retransmissions
TelemetryReceiver (Radar Station)
Receives and displays ship telemetry on a professional radar interface.
Radar Controls:
- Range: 50-1000 nautical miles
- Sweep Speed: 1-60 RPM wave animation
- Contact Display: Real-time position with bearing/range data
- Recording/Playback: Capture and replay telemetry sessions
🔧 Technical Architecture
Communication Protocol
UDP + ACK Hybrid Protocol
├── Sequence Numbers (packet ordering)
├── Timestamps (millisecond precision)
├── ACK Mechanism (reliability)
├── Timeout & Retransmission (3s/3 attempts)
└── JSON Payload Format
Data Structures
struct TelemetryPacket {
quint32 sequenceNumber;
QDateTime timestamp;
double latitude;
double longitude;
double speed;
QString status;
bool needsAck;
};
Thread Safety
- QReadWriteLock for data protection
- QMutex for socket operations
- Atomic counters for statistics
- Non-blocking I/O operations
Loss Recovery Mechanisms
- Packet Loss Detection: Missing sequence number identification
- Linear Interpolation: Calculate missing positions from adjacent packets
- Last Valid Data: Fallback to previous known position
- Timeout Management: Configurable packet timeout (5s default)
🚀 Getting Started
Prerequisites
- Qt 5.15+ or Qt 6.x
- CMake 3.16+ or qmake
- C++17 compatible compiler
- Network permissions for UDP communication
Building the Project
Using CMake
# Clone or extract the project
cd SensorPanel
# Build Receiver
cd TelemetryReceiver
mkdir build && cd build
cmake ..
make
# Build Sender
cd ../../TelemetrySender
mkdir build && cd build
cmake ..
make
Using qmake
# Build Receiver
cd TelemetryReceiver
qmake TelemetryReceiver.pro
make
# Build Sender
cd ../TelemetrySender
qmake TelemetrySender.pro
make
Running the System
- Start Receiver (Radar Station)
cd TelemetryReceiver
./TelemetryReceiver
- Start Sender (Ship Simulator)
cd TelemetrySender
./TelemetrySender
Configure Ship Movement
- Set starting position (latitude/longitude)
- Configure movement increments
- Set speed and transmission intervals
- Click "Start Sending"
Monitor Radar Display
- Observe ship position on radar
- Monitor network statistics
- Adjust radar range and sweep speed
📊 Network Statistics
Real-time Monitoring
- Packets Received: Total successful receptions
- Packet Loss Rate: Percentage with color coding
- 🟢 < 1%: Excellent (Green)
- 🟠 1-5%: Acceptable (Orange)
- 🔴 > 5%: Poor (Red)
- Interpolated Packets: Missing data estimations
- Retransmissions: Failed delivery attempts
Performance Tuning
// Receiver Configuration
receiver->setInterpolationEnabled(true);
receiver->setMaxBufferSize(1000);
receiver->setPacketTimeoutMs(5000);
// Sender Configuration
sender->setAckTimeoutMs(3000);
sender->setMaxRetransmissions(3);
sender->setReliabilityEnabled(true);
🎯 Usage Examples
Basic Ship Tracking
// Configure starting position (Istanbul area)
latitude: 41.000000°
longitude: 29.000000°
speed: 25 km/h
// Set movement pattern (northeast)
latitude increment: +0.01°
longitude increment: +0.01°
movement interval: 3 seconds
Network Simulation
// High-frequency updates
send interval: 500ms
movement interval: 2s
// Reliability testing
ACK timeout: 2s
max retransmissions: 5
🔧 Configuration Parameters
Sender Parameters
| Parameter | Range | Default | Description |
|-----------|-------|---------|-------------|
| Latitude | -90° to +90° | 39.0° | Ship starting latitude |
| Longitude | -180° to +180° | 35.5° | Ship starting longitude |
| Speed | 0-100 km/h | 25 km/h | Ship speed |
| Lat Increment | -1° to +1° | 0.01° | Latitude change per movement |
| Lon Increment | -1° to +1° | 0.01° | Longitude change per movement |
| Send Interval | 100ms-10s | 1s | Telemetry transmission rate |
| Movement Interval | 1-60s | 3s | Position update frequency |
Receiver Parameters
| Parameter | Range | Default | Description |
|-----------|-------|---------|-------------|
| Radar Range | 50-1000 NM | 500 NM | Maximum detection range |
| Sweep Speed | 1-60 RPM | 12 RPM | Wave animation speed |
| Buffer Size | 100-10000 | 1000 | Packet buffer capacity |
| Packet Timeout | 1-30s | 5s | Missing packet timeout |
| Interpolation | On/Off | On | Enable position interpolation |
🐛 Troubleshooting
Common Issues
No Connection
- Check firewall settings for UDP port 12345
- Ensure both applications run on same machine
- Verify network interface availability
High Packet Loss
- Reduce send interval (increase time between packets)
- Check system network load
- Increase ACK timeout duration
Interpolation Errors
- Verify movement increments are reasonable
- Check for large position jumps
- Monitor sequence number continuity
Performance Issues
- Reduce radar sweep speed
- Limit buffer size
- Disable debug logging in release builds
Debug Mode
Enable verbose logging by uncommenting debug statements:
qDebug() << "ReliableUDP: Packet" << sequenceNumber << "received";
📚 API Reference
ReliableUdpReceiver
// Core functionality
bool startListening(quint16 port = 12345);
void setInterpolationEnabled(bool enabled);
void setMaxBufferSize(int size);
// Statistics
int getPacketsReceived() const;
double getPacketLossRate() const;
// Signals
void telemetryDataReceived(const TelemetryPacket &packet);
void statisticsUpdated();
ReliableUdpSender
// Configuration
void setTarget(const QHostAddress &address, quint16 port);
void setReliabilityEnabled(bool enabled);
void sendTelemetryData(const TelemetryPacket &packet);
// Signals
void ackReceived(quint32 sequenceNumber);
void packetTimeout(quint32 sequenceNumber);
RadarWidget
// Display control
void setRange(double nauticalMiles);
void setSweepSpeed(double rpm);
void toggleSweep(bool enabled);
// Data input
void addTelemetryContact(const TelemetryData &data);
void clearContact();
🤝 Contributing
- Fork the repository
- Create a feature branch (
git checkout -b feature/amazing-feature) - Commit your changes (
git commit -m 'Add amazing feature') - Push to the branch (
git push origin feature/amazing-feature) - Open a Pull Request
📄 License
This project is licensed under the MIT License - see the LICENSE file for details.
🙏 Acknowledgments
- Qt Framework for cross-platform GUI development
- Maritime radar display standards for authentic visualization
- UDP protocol specifications for reliable communication design
📞 Support
For technical support or questions:
- Create an issue in the repository
- Check troubleshooting section above
- Review Qt documentation for platform-specific issues
Built with ❤️ for maritime simulation and telemetry applications